基于熱電偶環(huán)境溫場(chǎng)測(cè)量的關(guān)鍵問題改進(jìn)
發(fā)布時(shí)間:2021-01-04
瀏覽次數(shù):
摘要:分析了
熱電偶溫度測(cè)量不確定度,、溫場(chǎng)穩(wěn)定度測(cè)量不確定度和溫場(chǎng)均勻度測(cè)量不確定度,,為環(huán)境的溫場(chǎng)參數(shù)測(cè)量和控制提供理論保障.分析表明,,熱電偶測(cè)溫不確定度與熱電偶熱電動(dòng)勢(shì),、參考端溫度傳感器的測(cè)量不確定度密切相關(guān):溫場(chǎng)均勻度測(cè)量不確定度與熱電偶熱電動(dòng)勢(shì)的測(cè)量不確定度密切相關(guān):溫場(chǎng)穩(wěn)定度測(cè)量不確定度與熱電偶熱電動(dòng)勢(shì)和溫差擬合函數(shù)的關(guān)系密切,在一次線性擬合的條件下取決于擬合函數(shù)的斜率.針對(duì)測(cè)量過程中存在的脈沖噪聲和熱電偶非線性的干擾,,結(jié)合環(huán)境溫度信號(hào)變化緩慢的特點(diǎn),提出綜合運(yùn)用均值濾波和中值濾波處理熱電偶熱電動(dòng)勢(shì)測(cè)量數(shù)據(jù)去除測(cè)量中脈動(dòng)噪聲和熱電偶非線性對(duì)測(cè)量結(jié)果的影響.
0引言
高精確度溫度計(jì)量是計(jì)量和制造納米幾何尺寸的重要前提.大范圍納米坐標(biāo)測(cè)量機(jī)提出了保障常溫下密閉空間內(nèi)溫度具有高穩(wěn)定度和高均勻度的要求.迄今為止的文獻(xiàn)中僅通過某種算法計(jì)算測(cè)量環(huán)境的溫度均勻性和穩(wěn)定性,,而未分析其測(cè)量不確定度,因此無法保證所構(gòu)建的測(cè)量環(huán)境符合其設(shè)計(jì)精確度要求.
響應(yīng)速度快、不存在自熱等優(yōu)點(diǎn)的熱電偶,較熱電阻等其他溫度傳感器更適用于密閉空間內(nèi)溫度的測(cè)量,但常規(guī)應(yīng)用的熱電偶個(gè)體間差異較大,、穩(wěn)定性差而無法滿足空間內(nèi)溫場(chǎng)均勻性測(cè)量要求.這種差異可通過在實(shí)驗(yàn)室中分別標(biāo)定每支熱電偶而得到克服,,因此實(shí)驗(yàn)室條件下應(yīng)用熱電偶能夠給出較常規(guī)應(yīng)用更高的測(cè)量精確度.我們?cè)跍囟确秶?8~22℃的條件下使用銅-康銅熱電偶測(cè)量納米坐標(biāo)測(cè)量機(jī)的工作環(huán)境溫度,分析了基于熱電偶測(cè)溫的溫度測(cè)量不確定度和測(cè)量環(huán)境溫場(chǎng)穩(wěn)定度、均勻度的測(cè)量不確定度,為環(huán)境的溫場(chǎng)參數(shù)測(cè)量提供了理論保障.同時(shí),,針對(duì)測(cè)量過程中存在的脈沖噪聲和熱電偶非線性的干擾,,結(jié)合納米坐標(biāo)測(cè)量機(jī)的工作環(huán)境溫度信號(hào)變化緩慢的特點(diǎn),提出綜合運(yùn)用均值濾波和中值濾波處理熱電偶熱電動(dòng)勢(shì)測(cè)量數(shù)據(jù),,以使更好地測(cè)量測(cè)量環(huán)境的溫場(chǎng)分布.
1熱電偶測(cè)溫原理及模型
根據(jù)Seebeck效應(yīng),,當(dāng)組成熱電偶的材料一定時(shí),熱電偶的熱電動(dòng)勢(shì)只取決于熱電偶測(cè)溫回路的兩個(gè)接點(diǎn)溫度.即熱電偶檢測(cè)端溫度可表示為
T=T。+△T=To+φ(E
ABT,T。)(1)
式中:A,、B為組成熱電偶兩極的兩種材料:T,。為熱電偶參考端溫度(℃);E
AB為溫差△T=T-T。時(shí)的熱電偶熱電動(dòng)勢(shì)(nV).
根據(jù)美國(guó)國(guó)家標(biāo)準(zhǔn)局NBS)提供的銅-康銅熱電偶電壓特征數(shù)據(jù)與溫度對(duì)應(yīng)關(guān)系一熱電動(dòng)勢(shì)與測(cè)量端和參考端溫差近似呈線性甲,考慮到實(shí)際測(cè)溫范圍為4℃左右,,認(rèn)為熱電偶熱電動(dòng)勢(shì)與測(cè)量端和參考端溫差為1次函數(shù)關(guān)系是合理的,,即熱電偶測(cè)溫模型可表征為
T=T。+△T=T,。+aE+b(2)
式中:△T=kE+b,為溫差和熱電動(dòng)勢(shì)的1次最小二乘擬合關(guān)系式;a為斜率(℃/nV),b為截距(C).
2實(shí)驗(yàn)系統(tǒng)
實(shí)驗(yàn)系統(tǒng)包括機(jī)械系統(tǒng),、數(shù)據(jù)采集系統(tǒng)和軟件平臺(tái)等三部分,如圖1所示.熱電偶的測(cè)量端和參考端分別置于兩個(gè)相同結(jié)構(gòu)的保溫箱體立方體結(jié)構(gòu),6面均采用200mm苯板隔熱)內(nèi)的杜瓦瓶中,并在測(cè)量中采用兩支--等標(biāo)準(zhǔn)鉑電阻測(cè)量熱電偶補(bǔ)償端和測(cè)量端的溫度,使用兩個(gè)純銅塊分別包裹熱電偶參考端和參考端的一級(jí)標(biāo)準(zhǔn)鉑電阻以及熱電偶測(cè)量端和測(cè)量端的一級(jí)標(biāo)準(zhǔn)鉑電阻,使兩支一等標(biāo)準(zhǔn)鉑電阻盡可能分別與熱電偶參考端和測(cè)量端溫度相同,,然后分別放置于參考端和測(cè)量端中盛油的杜瓦瓶中,將該盛油杜瓦瓶置于箱體中央.
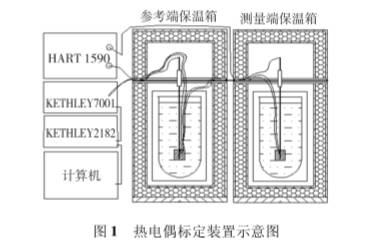
采用HART1590型測(cè)溫儀分別測(cè)量參考端和測(cè)量端的一等鉑電阻,獲得熱電偶參考端和測(cè)量端的溫度.測(cè)溫儀的測(cè)量不確定度在1C內(nèi)達(dá)1ppm.
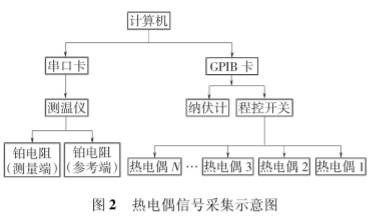
熱電偶溫差熱電動(dòng)勢(shì)的采集由KETHLEY7001.可編程程控開關(guān),、KETHLEY2182納伏計(jì)組成,并由計(jì)算機(jī)控制.程控開關(guān)的作用是根據(jù)計(jì)算機(jī)指令使待標(biāo)定的熱電偶與納伏計(jì)連接,由納伏計(jì)測(cè)量該熱電偶的熱電動(dòng)勢(shì).數(shù)據(jù)采集系統(tǒng)如圖2所示.測(cè)量溫差為0~3℃區(qū)間內(nèi)的熱電偶熱電動(dòng)勢(shì)的變化.根據(jù)式2)確定熱電動(dòng)勢(shì)和溫差的關(guān)系.
熱電偶熱電動(dòng)勢(shì),、測(cè)量端溫度和參考端溫度的具體測(cè)量過程如下:
1)n=NN:待標(biāo)定的熱電偶總數(shù));
2)i=1;
3)選通程控開關(guān)的第i通道,,讀取納伏計(jì)的熱電動(dòng)勢(shì)測(cè)量值Ei);
4)測(cè)溫儀讀取熱電偶測(cè)量端溫度R,6);
5)測(cè)溫儀讀取熱電偶補(bǔ)償端溫度R。6);
6)i=i+1;
7)i>n?否,重復(fù)步驟3)~6);是,重復(fù)1)~7).
3溫度測(cè)量不確定度
熱電偶參考端溫度測(cè)量值在18~20℃之間,,標(biāo)定熱電偶測(cè)量端和補(bǔ)償端溫差范圍~4C.并進(jìn)行了大范圍重復(fù)標(biāo)定,標(biāo)定點(diǎn)的數(shù)量足以滿足實(shí)驗(yàn)要求.
根據(jù)式2)獲得熱電偶測(cè)量端溫度測(cè)量不確定度回為

文[D7]給出了熱電偶測(cè)溫不確定度的詳細(xì)計(jì)算方法.△T為4℃時(shí),E不大于1.7×10
5nV,取E=1.7×10
5nV.對(duì)其中一只熱電偶測(cè)量數(shù)據(jù)擬合后.有:a=-2.5×10
-5.,、σ。=5.2×10
-9,、b=4.4x10
-5,、σ。=0.2×10
-3(℃),根據(jù)標(biāo)定系統(tǒng)具體使用的測(cè)量?jī)x器和實(shí)驗(yàn)結(jié)果,熱電偶測(cè)量端溫度測(cè)量不確定度構(gòu)成如表1所示.
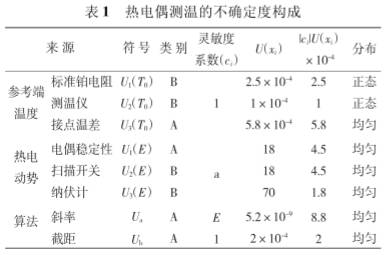
由式4)和表1得冷熱端溫差為4℃時(shí),,熱電偶.測(cè)溫標(biāo)準(zhǔn)不確定度為2.2×10
-3℃.置信概率為0.99時(shí),取k=3,則其擴(kuò)展不確定度表示為
U99=3×UT)=6.6×10
-3℃
4溫場(chǎng)均勻度測(cè)量不確定度
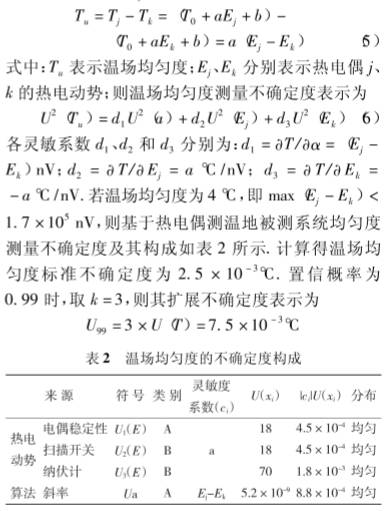
溫場(chǎng)均勻度通常定義為一段時(shí)間內(nèi),,待測(cè)量溫場(chǎng)內(nèi)溫度變化的最大值和最小值之差.對(duì)于實(shí)際被測(cè)系統(tǒng)而言,通常采用在溫場(chǎng)的特征點(diǎn)處采集特征點(diǎn)溫度的變化,并將所有被測(cè)特征點(diǎn)在-.定時(shí)間內(nèi)的溫度變化幅值定義為溫場(chǎng)的均勻度.因此,設(shè)一-定時(shí)間內(nèi)溫場(chǎng)中的兩點(diǎn)j、h出現(xiàn)最大值和最小值,,其溫度分別表示為Tj,、Tk,則溫場(chǎng)均勻度表示為
5溫場(chǎng)穩(wěn)定度測(cè)量不確定度
溫場(chǎng)穩(wěn)定度通常定義為-段時(shí)間內(nèi),溫場(chǎng)內(nèi)某個(gè)待測(cè)特征點(diǎn)溫度變化的最大值和最小值之差.實(shí)際測(cè)量過程中,通常采用一只溫度傳感器在一-段時(shí)間內(nèi)溫度測(cè)量值的最大最小值之差表示溫場(chǎng)穩(wěn)定度,,設(shè)在該段時(shí)間內(nèi)傳感器在t1,和t2時(shí)刻獲得最大Tmax,、最小值Tmin,則溫場(chǎng)穩(wěn)定度表示為


從表1~3中可以看出,熱電偶熱電動(dòng)勢(shì)測(cè)量的精度嚴(yán)重影響熱電偶測(cè)溫不確定度和溫場(chǎng)均勻度測(cè)量不確定度,而溫場(chǎng)穩(wěn)定度測(cè)量不確定度與熱電偶熱電動(dòng)勢(shì)和溫差擬合函數(shù)的關(guān)系密切,在一次線性擬合的條件下取決于擬合函數(shù)的斜率,但高測(cè)量環(huán)境通常具有很好的溫度穩(wěn)定度,一般小于0.1℃,這意味著溫場(chǎng)穩(wěn)定度測(cè)量不確定度通常在萬分之兒攝氏度或更小:為改善溫場(chǎng)溫度測(cè)量不確定度以及溫場(chǎng)均勻度測(cè)量不確定度,采用熱電偶作高溫度測(cè)量時(shí)需提高熱電偶熱電動(dòng)勢(shì)的測(cè)量精度.同時(shí),也可以看出,,采用上述方法標(biāo)定的熱電偶能夠滿足測(cè)量環(huán)境所要求的±0.01℃的溫度國(guó)測(cè)量要求.
6測(cè)溫過程的數(shù)據(jù)處理技術(shù).
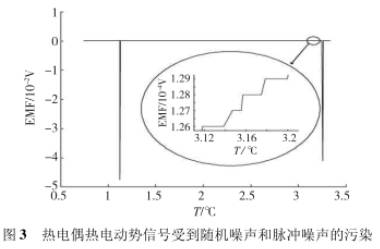
文8]在低溫?zé)犭娕紭?biāo)定過程中發(fā)現(xiàn)熱電偶測(cè)溫存在非線性現(xiàn)象,,并采用分形方法分析了由于這種非線性引入的熱電偶測(cè)溫誤差,其分析表明這種非線性存在一定的隨機(jī)性,且各傳感器間測(cè)量存在弱相關(guān),,但沒有給出改善這種非線性的方法.在采用本文給出的系統(tǒng)標(biāo)定熱電偶的過程中,,我們也發(fā)現(xiàn)了這種非線性現(xiàn)象,同時(shí)還發(fā)現(xiàn)熱電偶熱電動(dòng)勢(shì)采集過程中存在脈沖噪聲,如圖3所示,,測(cè)量過程中在溫差為1~1.5℃和3~3.5℃之間兩次出現(xiàn)脈沖噪聲:選取溫差為3.1~3.2℃之間的測(cè)量數(shù)據(jù)曲線觀察測(cè)量存在非線性現(xiàn)象.
為減弱測(cè)量中隨機(jī)噪聲和脈沖噪聲的干擾,考慮對(duì)測(cè)量過程采取濾波運(yùn)算.一般信號(hào)測(cè)量過程中同時(shí)含有多種噪聲,因此應(yīng)考慮如何濾波才能達(dá)到效果.假如綜合使用不同的濾波方法,,則先使用的濾波運(yùn)算可能會(huì)對(duì)其他性質(zhì)的噪聲產(chǎn)生影響,,導(dǎo)致其他濾波方法效果變差.目前還沒有一種方法對(duì)所有信號(hào)的處理效果均為佳,某一種單一濾波算法只能較好地對(duì)含有一種或幾種噪聲類型的信號(hào)進(jìn).行處理.抑制噪聲并能夠在處理中保留信號(hào)真實(shí)的變化趨勢(shì)是相互制約的.
工程實(shí)際中一般通過簡(jiǎn)單的算法或簡(jiǎn)單算法的組合來達(dá)到信號(hào)處理的目的,如均值濾波和中值濾波就是工程實(shí)際中經(jīng)常使用的濾波算法.均值濾波方法能夠有效地濾除隨機(jī)噪聲中的高斯噪聲,但對(duì)與信號(hào)有關(guān)的噪聲和脈沖噪聲抑制效果較差.同時(shí),均值濾波存在鈍化信號(hào)變化趨勢(shì)的作用,,且濾波窗口越大,信號(hào)變化趨勢(shì)的鈍化越嚴(yán)重.均值濾波算法如下式:

式中:y(t)為原始信號(hào)在1時(shí)刻的測(cè)量值:S為1時(shí)刻的時(shí)間鄰域;M為鄰域S的信號(hào)測(cè)量個(gè)數(shù):g(t)為均值濾波后最終信號(hào).
中值濾波能較有效地抑制測(cè)量信號(hào)脈沖噪聲的干擾,且不改變信號(hào)頻譜,對(duì)隨機(jī)噪聲的抑制能力不如均值濾波.中值濾波是一個(gè)有奇數(shù)點(diǎn)的滑動(dòng)窗口,,將窗口中心點(diǎn)的值用窗口內(nèi)各點(diǎn)的中值代替,可以用下式表示:

式中:A為濾波窗口:Med為取中值運(yùn)算:里6)}為A中所有測(cè)量信號(hào)的集合序列.
由于待處理的信號(hào)中既包含有脈沖噪聲又包含有隨機(jī)噪聲,因此綜合運(yùn)用中值濾波和均值濾波算法,改進(jìn)式00)的中值濾波方法,,使中值濾波輸出為一個(gè)序列,將該輸出序列作均值濾波處理得到該測(cè):量時(shí)刻的信號(hào)測(cè)量值.具體算法如下:
1)讀取5個(gè)溫度測(cè)量值,,獲得測(cè)量序列{f(t)}=f(ti-2)f(ti-1)f(ti)f(ti+1)f(i+2)}.
2)取式(10)中A=5,計(jì)算序列f(t)}的最大值和最小值,去掉最大值和最小值得到式Q0)的輸出序列{y(t)}=y(t1)y(t2)y(t3)
3)取式(9)中M=3,計(jì)算信號(hào)g(t)的值..
依次對(duì)所有測(cè)量值處理,最終輸出即為經(jīng)中值濾波器和均值濾波器的信號(hào)輸出值.
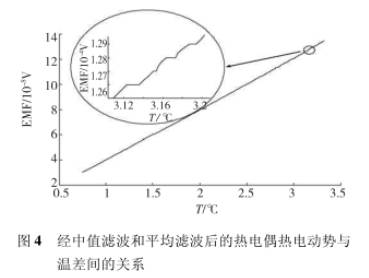
經(jīng)上述方法處理后的信號(hào)如圖4所示可見,經(jīng)處理后的信號(hào)去除了脈沖噪聲的干擾,,同時(shí),,信號(hào)的非線性得到了一定程度的抑制.
7結(jié)論
1)分析了基于熱電偶測(cè)溫的溫度測(cè)量不確定度、溫場(chǎng)穩(wěn)定度測(cè)量不確定度和溫場(chǎng)均勻度測(cè)量不確定度,,為環(huán)境溫場(chǎng)參數(shù)的測(cè)量和控制提供理論保障.分析表明,,熱電偶測(cè)溫不確定度與熱電偶熱電動(dòng)勢(shì)、參考端溫度傳感器的測(cè)量不確定度密切相關(guān):溫場(chǎng)均勻度測(cè)量不確定度與熱電偶熱電動(dòng)勢(shì)的測(cè)量不確定度密切相關(guān):溫場(chǎng)穩(wěn)定度測(cè)量不確定度與熱電偶熱電動(dòng)勢(shì)和溫差擬合函數(shù)的關(guān)系密切,在一次線性擬合的條件下取決于擬合函數(shù)的斜率,。
2)采用熱電偶作窄溫區(qū)溫度測(cè)量,置信概率為0.99時(shí),溫區(qū)為4℃時(shí),,其溫度測(cè)量不確定度可達(dá).6.6×10
-3℃;均勻度為4℃時(shí),其溫場(chǎng)均勻度測(cè)量不確定度可達(dá)7.5×10
-3℃:穩(wěn)定度為0.4℃時(shí),其溫場(chǎng)穩(wěn)定度測(cè)量不確定度可達(dá)0.26×10
-3℃.分析表明,采用比對(duì)法標(biāo)定的熱電偶溫度測(cè)量指標(biāo)能夠滿足測(cè)量環(huán)境要求的±0.01℃溫度測(cè)量要求.
3)針對(duì)測(cè)量過程中存在的脈沖噪聲和熱電偶非線性的干擾,,結(jié)合環(huán)境溫度信號(hào)變化緩慢的特點(diǎn),提出綜合運(yùn)用均值濾波和中值濾波處理熱電偶熱電動(dòng)勢(shì)測(cè)量數(shù)據(jù),很好地去除了測(cè)量中脈動(dòng)噪聲的干擾,同時(shí)也減小了熱電偶非線性對(duì)測(cè)量結(jié)果的影響.

