熱電偶電動(dòng)勢的測量偏差分析
發(fā)布時(shí)間:2023-05-25
瀏覽次數(shù):
摘要:直流電位差計(jì)可以較準(zhǔn)確地測量出被測值,,但仍舊存在一定的偏差,。對運(yùn)用直流電位差計(jì)測量
熱電偶熱電動(dòng)勢產(chǎn)生的偏差進(jìn)行分析,計(jì)算了測量系統(tǒng)的A類和B類不確定度。介紹了可以修正測量系統(tǒng)部分偏差的方法,說明了可略去的偏差原因.
0引言
熱電偶是工業(yè)生產(chǎn)上常用測溫儀表中的測溫元件,它能直接測量溫度,,并把溫度這個(gè)物理量轉(zhuǎn)換成熱電動(dòng)勢[1].因此,對熱電動(dòng)勢值的準(zhǔn)確測量可提高測溫的準(zhǔn)確性,、直流電位差計(jì)是利用直流補(bǔ)償原理制成的一-種測量儀器,、所謂補(bǔ)償法也是一種比較測量法,測量準(zhǔn)確度比較高,,除測量電壓外,,還用于測量電流、電阻,、電功率(2].但是,,采用直流電位差計(jì)測量熱電偶的熱電動(dòng)勢,也會(huì)和其他儀器一樣產(chǎn)生一定的偏差,,下面就其在測量熱電偶熱電動(dòng)勢時(shí)的不確定度進(jìn)行分析計(jì)算.
1電位差計(jì)測量電動(dòng)勢原理
如圖1所示是直流電位差計(jì)的原理圖,,可分為三個(gè)回路[2].
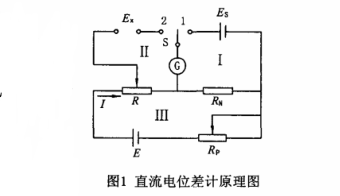
回路III為工作電流回路,有輔助電源E,可變電阻Rp,調(diào)節(jié)電阻R和標(biāo)準(zhǔn)電阻RN.它的任務(wù)主要是提供一個(gè)穩(wěn)定的工作電流.
回路I為校準(zhǔn)回路,,標(biāo)準(zhǔn)電池Es用來校準(zhǔn)工作電流,,把開關(guān)S合向1時(shí),調(diào)節(jié)Rp改變工作電流,,檢流計(jì)指零時(shí)有
Es=IRN(1)
回路II為測量回路,,保持工作電流不變,把開關(guān)S合向2時(shí),,調(diào)節(jié)電阻R,,若檢流計(jì)指零,,表明被測電勢Ex與電阻R上的壓降相互補(bǔ)償,即

2測量系統(tǒng)中可修正及可忽略的偏差
2.1可修正的偏差

測量電路中,,各種接觸點(diǎn)很多,,不可能做到完全歐姆接觸,,而且接點(diǎn)的熱容量也各不相同,,因而不可避免地會(huì)產(chǎn)生附加電勢,即寄生電勢,,它與被測熱電動(dòng)勢值相疊加從而影響被測量值.減少寄生電勢的方法是電流換向法,,考慮到寄生電勢方向與電流方向無關(guān),故本文采用如圖2(見15頁)所示的測量電路.
2.2可忽略的偏差
在測量電路配制中,,盡量使用偏差可略的元件,,其中包括:調(diào)節(jié)電阻Rp調(diào)節(jié)不夠所造成的偏差;因工作電流和被測熱電勢數(shù)值都較低且漏電并不嚴(yán)重,所以絕緣電阻達(dá)不到理想狀況的無窮大而引起的偏差也可忽略;在配制較好的穩(wěn)壓電源情況下,,可忽略工作電流回路輸出端電壓變化帶來的偏差[3].
3熱電偶熱電動(dòng)勢測量值的不確定度
3.1A類不確定度UA
表1是電位差計(jì)在熱電偶溫差一定時(shí)的熱電動(dòng)勢測量值,,共計(jì)10次.

由此看到該項(xiàng)偏差就是電阻上的偏差,主要有溫度偏差和制造調(diào)整偏差.對于本測量使用的UJ31型電位差計(jì)標(biāo)準(zhǔn)使用溫度是15~25℃,檢定溫度是20±1℃,設(shè)溫度每變化1℃電阻相對變化量為α,,20±1℃到25℃之間溫度相對變化的最大可能值則為
rtmax=6(αR一αRN)
而UJ31電位差計(jì)的|αR-αRN|≈7X10
-6,所以電阻上的溫度偏差為;
rtmax=6(αR-αRN)≈42X10
-6≈0.0042%
UJ31電位差計(jì)在制造時(shí)將電阻的制造調(diào)整偏差最大限制在0.01%,其余各部偏差可路.因此,此項(xiàng)偏差最大可能值為0.02%.溫度偏差和制造調(diào)整偏差總值為
rx≈0.0042%+0.02%≈0.024%
所以有

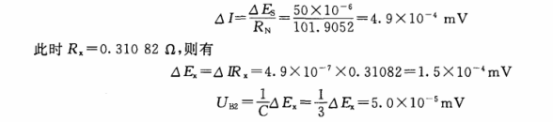
3.2.2電位差計(jì)測熱電偶熱電動(dòng)勢溫度補(bǔ)償盤偏差的不確定度Ux.
溫度補(bǔ)償盤是對熱電偶冷端溫度進(jìn)行補(bǔ)償?shù)?測量中使用的溫度補(bǔ)償盤所產(chǎn)生的溫度補(bǔ)償電壓最大偏差是±50μV,即△Es=50μV,所以
3.2.3檢流計(jì)靈敏度偏差的不確定度UB3,、UB4
測量電路中使用的檢流計(jì)為指針式,因其靈敏度不夠必然在校準(zhǔn)回路和測量回路中引起系統(tǒng)偏差,,設(shè)此兩項(xiàng)偏差的不確定度為UB3,、UB4.

首先計(jì)算校準(zhǔn)回路的檢流計(jì)靈敏度偏差的不確定度UB3.如圖3所示電路校準(zhǔn)時(shí)若完全補(bǔ)償則有Es=IRN,但因受檢流計(jì)靈敏度不夠的限制,不可能做到完全補(bǔ)償,回路I中就有電流,必然引起工作電流的變化,分:析電路可知

其中標(biāo)準(zhǔn)電池內(nèi)阻Rs=1200Ω、Rp=304.45Ω,、R=17.10Ω,、Rn=0.31082Ω、檢流計(jì)的靈敏度Sg=1.2X10
6div/A.靈敏度閾值△n=0.3div,、內(nèi)阻Rg=180Ω.

其次,,計(jì)算測量回路的檢流計(jì)靈敏度偏差的不確定度UB4.如圖4所示電路測量時(shí)若完全補(bǔ)償則有Ex=IRx,同樣因受檢流計(jì)靈敏度不夠的限制,不可能做到完全補(bǔ)償而產(chǎn)生偏差,,分析電路可知

3結(jié)語
(1)應(yīng)用Pro/E和ANSYS軟件建立了PVR系列葉片泵轉(zhuǎn)子的三維有限元模型,,并對轉(zhuǎn)子模型進(jìn)行了模態(tài)分析,得出了轉(zhuǎn)子的各階固有頻率及振型,,這為對轉(zhuǎn)子作進(jìn)一.步動(dòng)力學(xué)分析打下了基礎(chǔ),,同時(shí)也為實(shí)驗(yàn)?zāi)B(tài)分析中激勵(lì)方式、測點(diǎn)布置,、采樣頻率等因素的確定提供了依據(jù).(2)為準(zhǔn)確確定元件的各階頻率及振型,,一般采用應(yīng)用軟件分析與試驗(yàn)相結(jié)合的方式,因此本文用ANSYS分析所得的結(jié)果,,也為和實(shí)驗(yàn)數(shù)據(jù)進(jìn)行比較提供了依據(jù).通過二者結(jié)合后,,一般可相對精確地確定元件的固有頻率及振型,,為判斷元件在實(shí)際工作中是否會(huì)和外激勵(lì)發(fā)生共振以及如何避免共振提供了參考.

